What are the “6 Degrees of Freedom”?
6DOF explained
The six degrees of freedom is a common concept used in machinery, robotics, manufacturing, 3D modeling, video game design, vehicles, the human body, and many other designs.
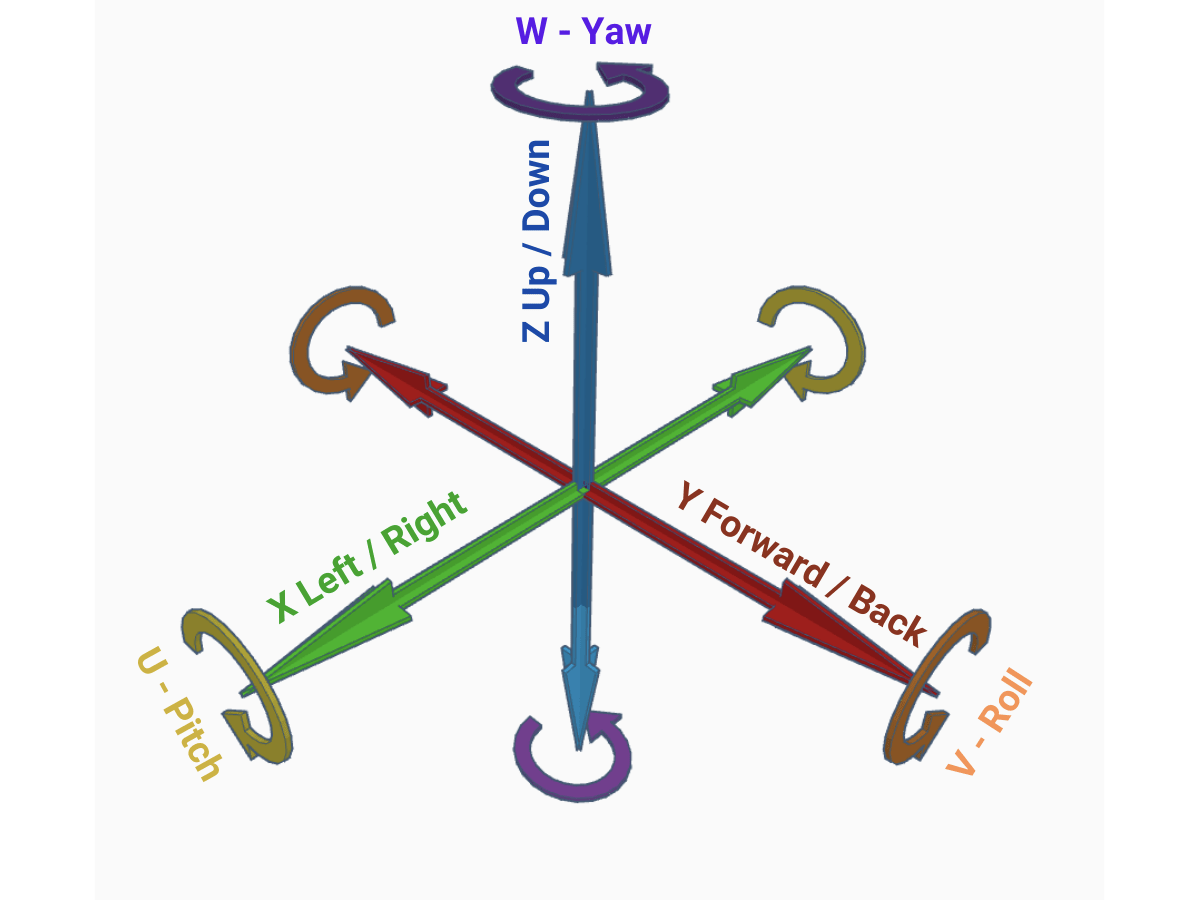
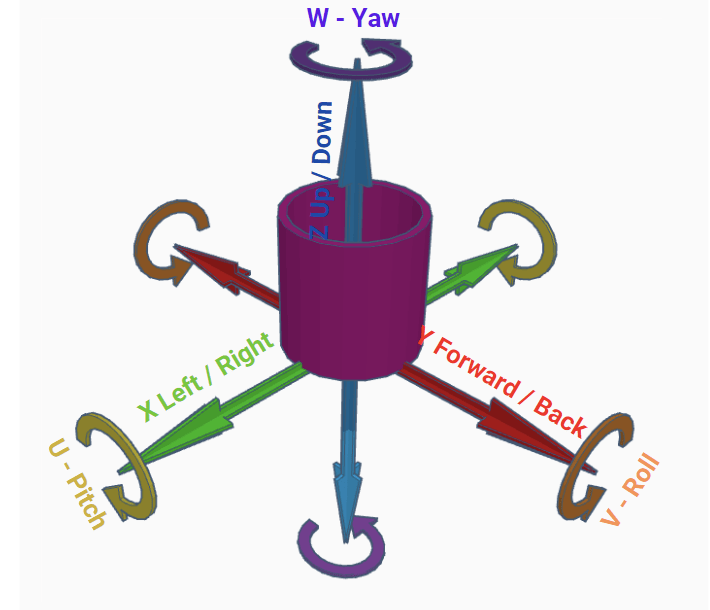
The 6 degrees of freedom is a representation of how an object moves through 3D space by either translating linearly or rotating axially. A single degree of freedom on an object is controlled by the up/down, forward/back, left/right, pitch, roll, or yaw.
The human head is a great example of an object that uses all of the 6degrees of freedom to move throughout 3D space. Your head can rotate in all three axes and can also move freely up/down, forward/back, and left/right.
6 Degrees of Freedom - Translation
Three of the 6 degrees of freedom are controlled through translation. Translation is an object’s movement in a 3D space in the Z axis (up and down), X axis (left and right), and Y axis (forward and back).
The linear translation degrees of freedom are controlled by defining the origin or the datum reference frame, which should all be perpendicular to one another respectively.
Note: If datums in the datum reference frame are parallel with one another, the datum reference frame will be unable to properly control the 3 linear translation degrees of freedom.
Translation does not have any effect on the rotation of a part. Theoretically, a part could be rotating in space and not have any movement or translation at all, like a spinning top.
If an object cannot move freely about a specific axis, that means that the axis’ degree of freedom is not controlled, and it is subject to change if manipulated.
6 Degrees of Freedom - Rotation
The remaining 3 degrees of freedom are controlled through axial rotation of a part. Typically, a part’s origin is at the center of the datum reference frame, which would also be the pivot point for each of the 3 rotational degrees of freedom: U axis (pitch), V axis (roll), and W axis (Yaw).
The rotational degrees of freedom are controlled by either a level plane (which could simultaneously control two rotational degrees of freedom) or by a line (which could only control one degree of freedom that is dependent on your work plane).
Similar to the 3 linear translation degrees of freedom, the rotational degrees of freedom will be perpendicular to one another. The rotational degrees of freedom will be considered at the center axis of the linear degrees of freedom. XYZ linearly are respective to UVW rotationally.

Controlling the Degrees of Freedom
The easiest way to understand if a degree of freedom is controlled is to look and see if that linear plane or axis can be moved. If it can, that degree of freedom is not fully constrained and is free to move upon manipulation.
When you control the 6 degrees of freedom you are essentially removing an object’s ability to translate and rotate in space. Typically, the degrees of freedom are controlled with a “three/two/one” alignment.
- Three - The primary datum has three points of contact and will coincidentally control 3 degrees of freedom (Z origin, roll, and pitch)
- Two - The secondary datum is two points of contact and controls one or two of the degrees of freedom (yaw and possibly X or Y origin)
- One - The tertiary datum is a single point of contact that controls one or two degrees of freedom (X and Y origin).
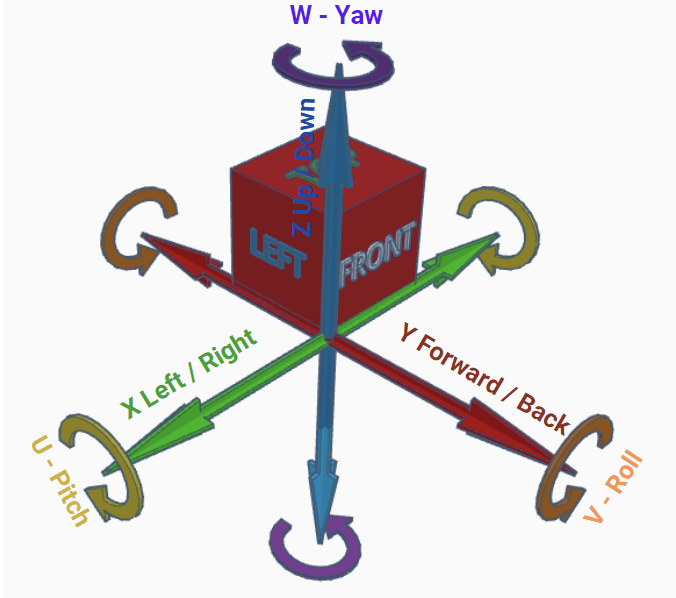
In the image above, the cube is being controlled by the bottom, front, and left planes.
- The bottom plane controls the Z origin, the roll, and the pitch.
- The front plane controls the yaw and the Y origin.
- The left plane controls the X origin.
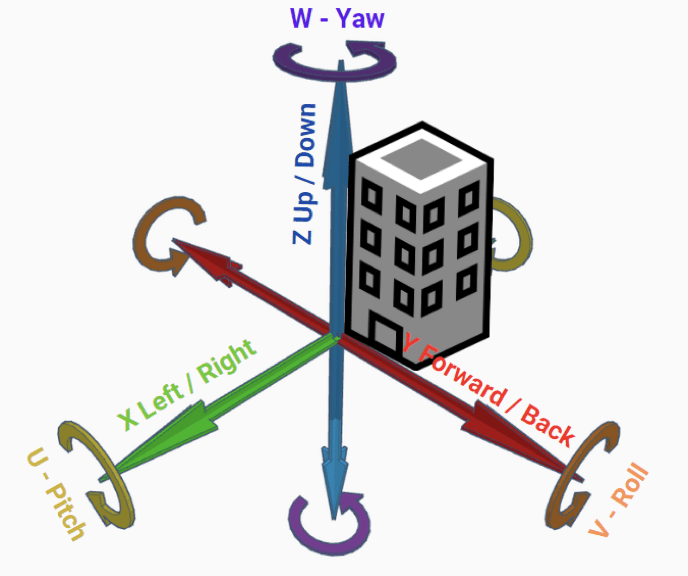
A building is a great example of an object that has all of the degrees of freedom controlled. You do not have to worry about a building moving up/down, forward/back, or left/right. You also do not have to worry about a building rolling or rotating.
If that building has an elevator in it, you can conclude that the elevator itself has 5 of the 6 degrees of freedom controlled; while 1 degree of freedom can be manipulated because the elevator is still able to freely move up/down.
If an object can move freely on an axis, that means that the axis that it is moving on does not have that axis controlled. A train can move forward and back but cannot move up, down, left, or right.
A gyroscope is a device that is used to control 2 of the 3 rotational degrees of freedom autonomously. As the center axis (yaw) spins and creates centrifugal force, the remaining 2 rotational degrees of freedom (pitch and roll) are controlled and therefore held in place.
When locating a cylinder there is an exception for controlling the 6 degrees of freedom. A perfect cylinder is theoretically identical, regardless of the position of the yaw. Therefore, it will be completely controlled with 5 degrees of freedom. If there are any rotationally specific features on a cylinder, such as a slot or a notch, you can use them to control the final degree of freedom.
Conclusion
The 6 degrees of freedom is a very simple concept that can also be very easy to apply, as long as you are aware of the few intricacies explained here. The six degrees of freedom are used in many industries such as robotics, modeling, CAD assemblies, and video game design. The whole world around us is using the six degrees of freedom for every moving application, whether we are aware of it or not.
If you have any questions, about the 6 degrees of freedom or any upcoming inspection or CMM programming needs, please contact us.




NEED A QUOTE?
Simply fill out your name, number, and email below and someone from our team will contact you within 24 hours.